
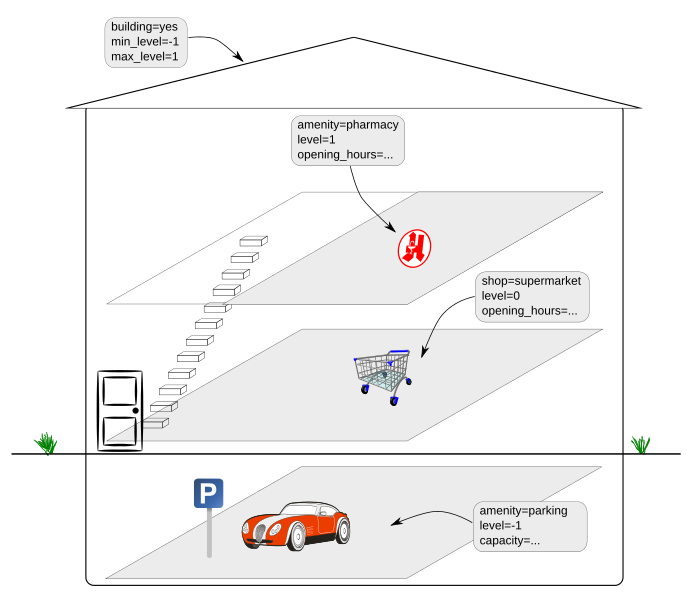
La cartographie d’intérieur sur OpenStreetMap est un vaste sujet, présent depuis des années au sein de la communauté. Par cartographie d’intérieur, on entend le fait de détailler l’architecture d’un bâtiment, niveau par niveau de manière précise : pièces, couloirs, escaliers, et les activités qui se déroulent dans chacun de ces espaces. Cela est rendu possible par un ensemble d’attributs (schéma « Simple Indoor Tagging« ) qui permettent d’indiquer sur chaque objet sa typologie (salle, espace, mur) et son étage (0 pour le rez-de-chaussée, 1 pour le 1er étage…).
La méthode de description est au final relativement simple. On s’attendrait alors que de très nombreux lieux soient ainsi décrits. Après tout, OSM est bien la base de données de référence sur d’autres thématiques, pourquoi pas celle-ci ? Malheureusement, ce n’est pas encore le cas.
Un monde à construire
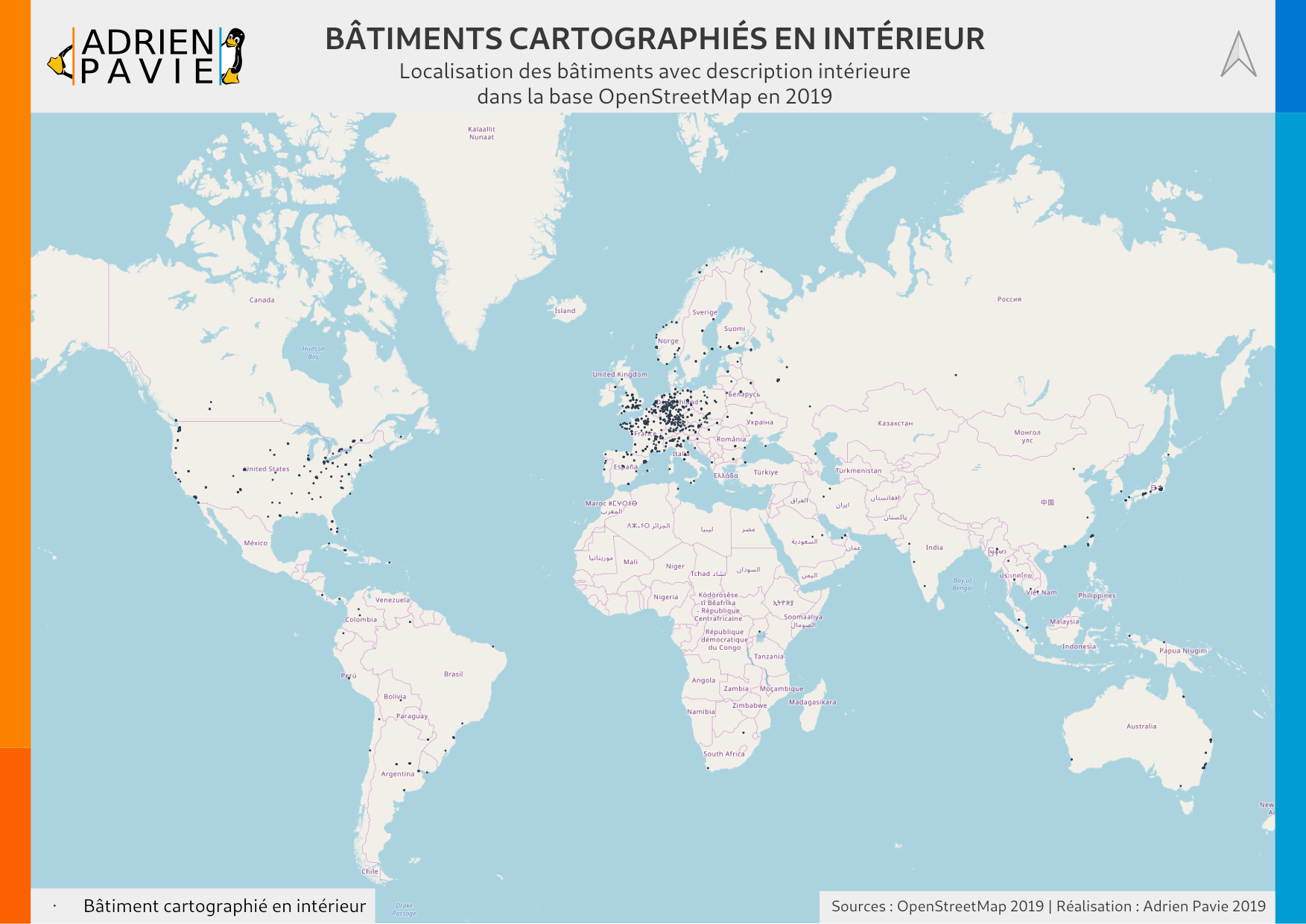
À ce jour, plus de 2500 bâtiments sont cartographiés en intérieur. Pour l’instant, l’essentiel des lieux renseignés se situe dans l’hémisphère Nord, en plus particulièrement en Europe. Une dynamique liée à la communauté, puisque le projet OpenStreetMap est né au Royaume-Uni et s’est d’abord diffusé à travers l’Europe.
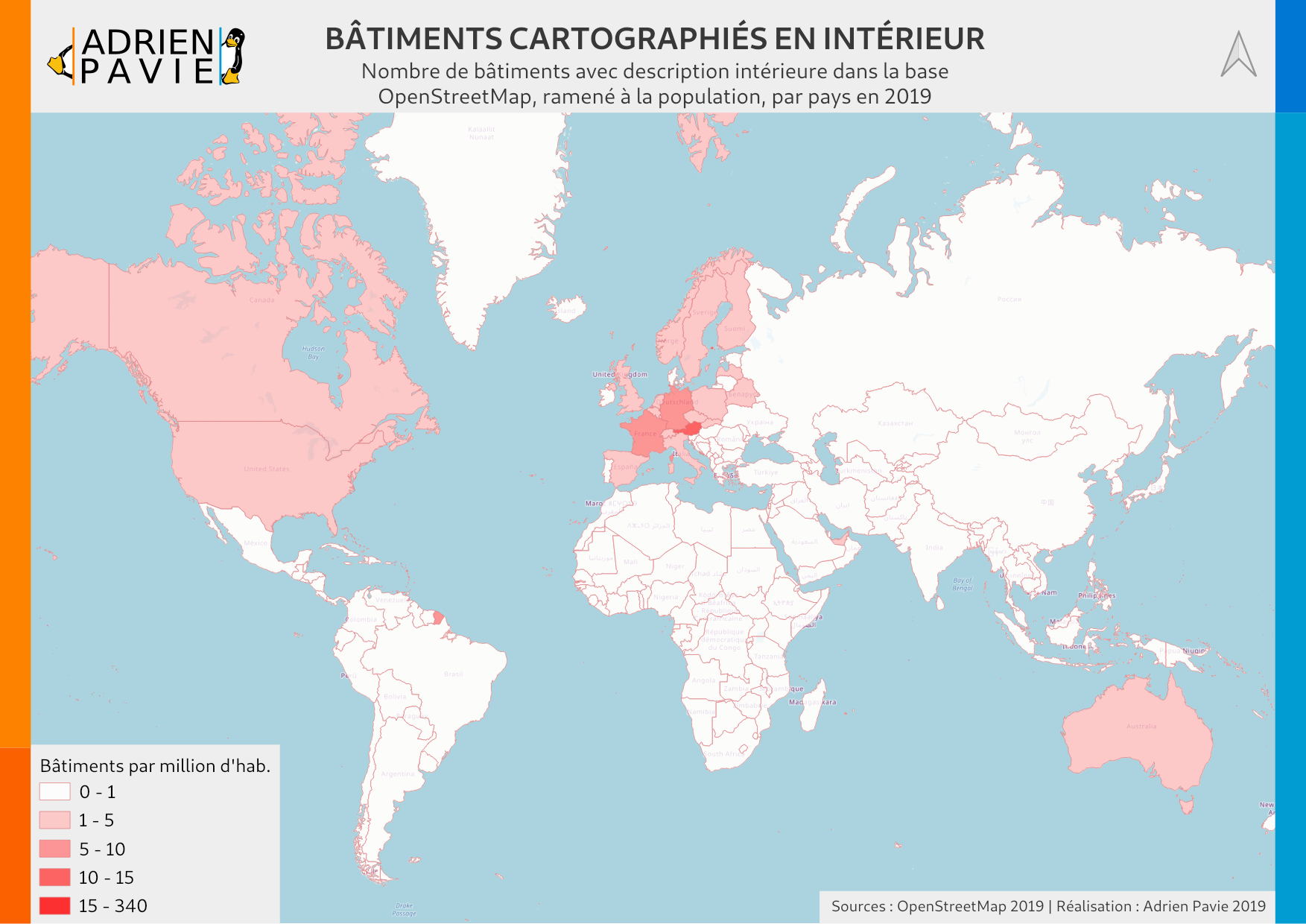
Si on compare à la population, la tendance se confirme. Le sujet prédomine en France, Allemagne, Autriche. Mention spéciale à l’île d’Åland, avec ses 9 bâtiments cartographiés pour 27000 habitants, ce qui en fait la région où le sujet s’est le plus répandu dans la population !
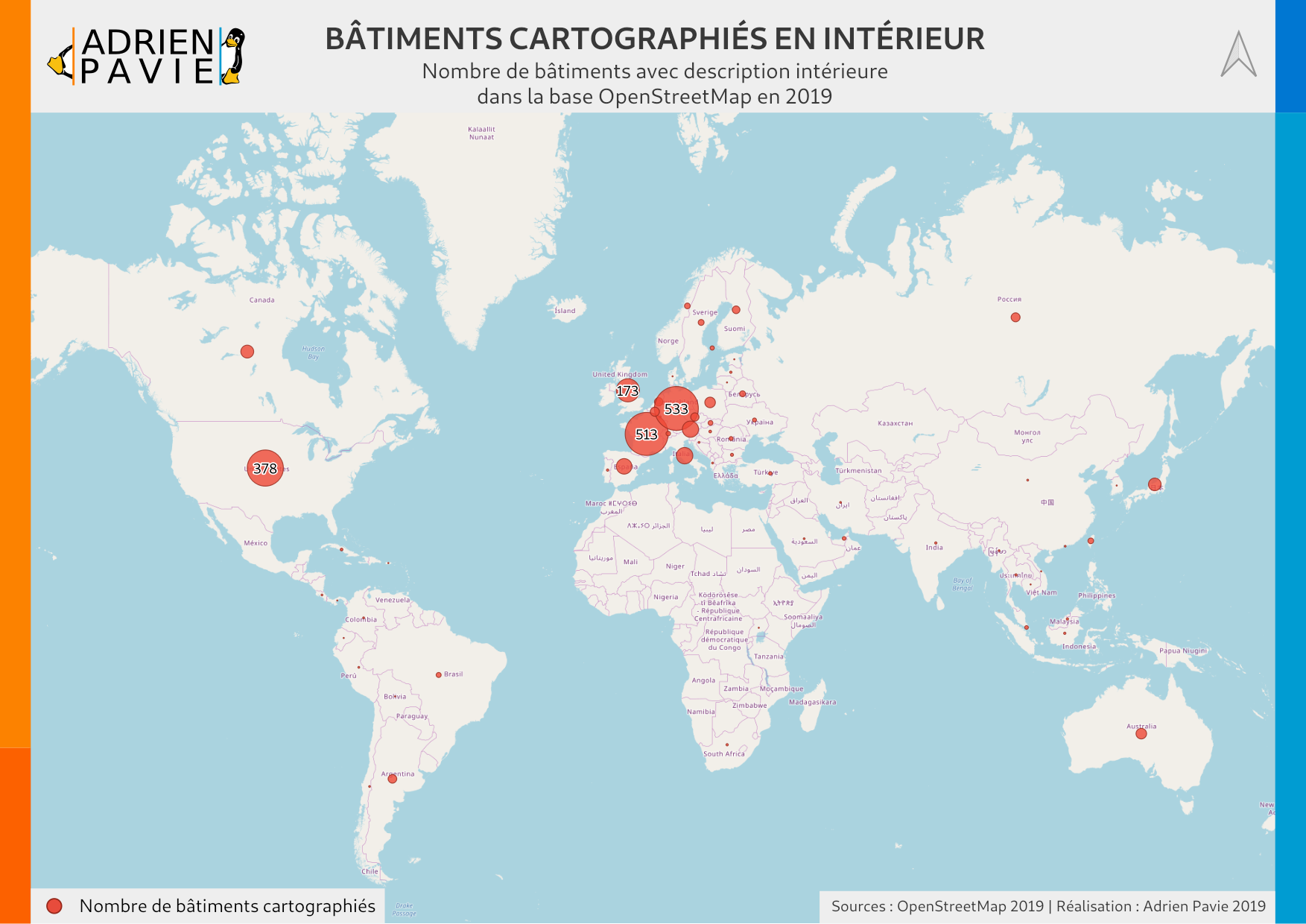
Si l’on regarde le nombre absolu de bâtiments renseignés, l’Allemagne et la France sont au coude-à-coude, suivi par les États-Unis. Ces chiffres sont probablement liés à l’activité de certaines structures autour du sujet. On peut citer les travaux de la SNCF Transilien en France ou de la American Printing House aux États-Unis, qui ont permis la cartographie de nombreux lieux sur OpenStreetMap.
Ces chiffres sont encourageants, mais restent au final épisodiques comparés aux nombres de lieux potentiels à cartographier :
- Plus de 400 000 centres commerciaux
- Environ 100 000 gares
- Plus de 100 000 universités et établissements d’enseignement supérieurs
Pourquoi donc la communauté n’avance pas plus vite sur cette thématique ?
Un sujet qui traîne…
À cause des schémas
La première trace notable de la cartographie d’intérieur sur OpenStreetMap remonte à 2011. Une première proposition d’attributs nommée IndoorOSM est publiée. Elle introduit le tag buildingpart=* ainsi que l’utilisation de relations pour créer de la cohérence entre espaces, niveaux et bâtiment. Malgré les défauts de conception du schéma, celui-ci est utilisé en partie pour commencer à décrire l’intérieur des bâtiments. Ce n’est qu’en 2014 que le schéma Simple Indoor Tagging est publié, et propose une alternative plus simple à mettre en œuvre.
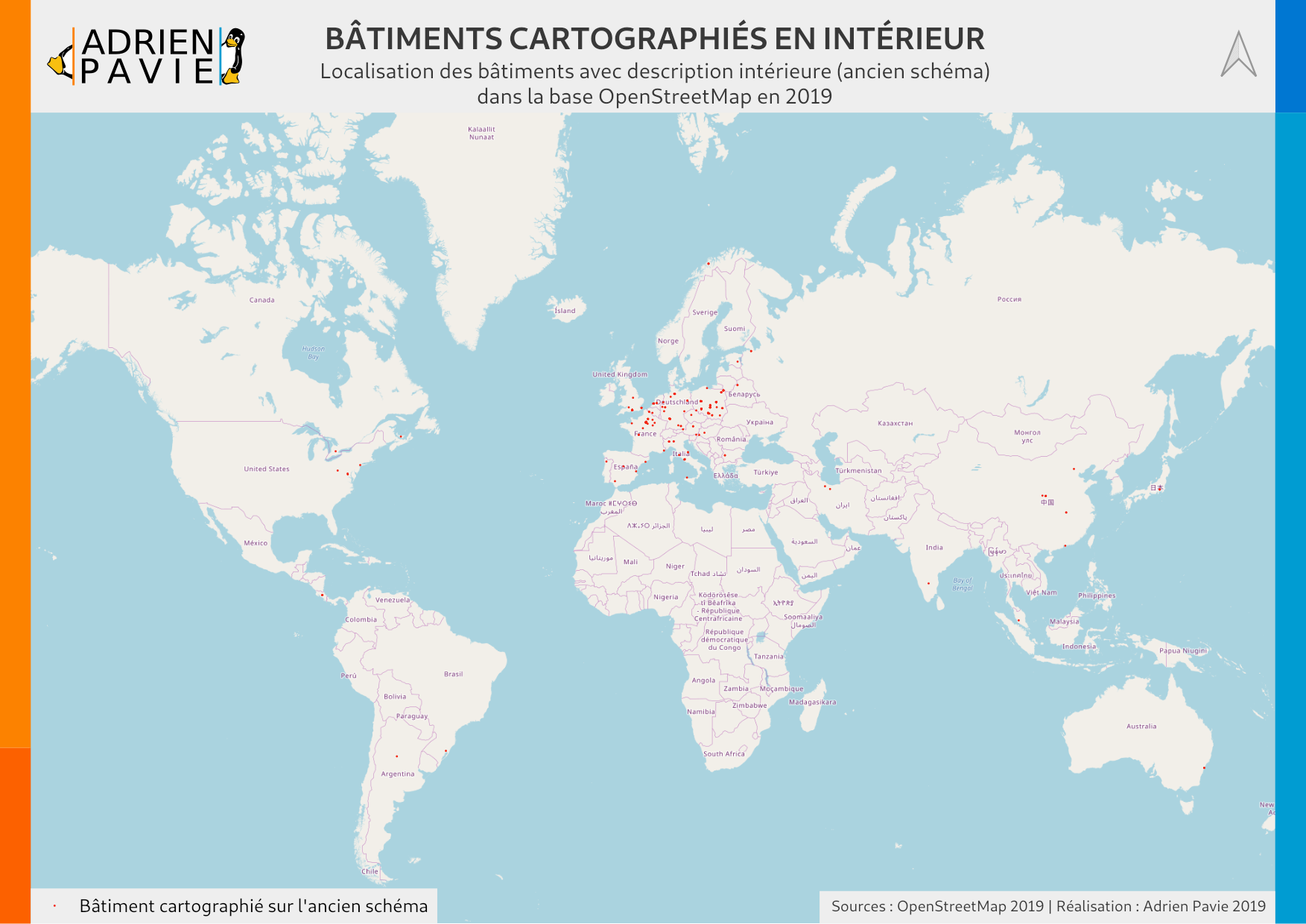
5 ans après, environ 260 bâtiments (1 sur 10) utilisent toujours l’ancien schéma IndoorOSM. Cette co-existence des deux schémas complexifie le rendu et la réutilisation des données d’intérieur.
À cause des outils
La cartographie d’intérieur pose un défi technique : gérer les niveaux. OpenStreetMap est une base de données à plat, représentant des données principalement en 2D. C’est la logique traditionnelle des cartes papiers puis numériques. Le problème est que notre monde est en 3D, il nous manque donc la représentation de la hauteur. Pour le schéma Simple Indoor Tagging, cela est géré simplement par l’attribut level=*. Il permet d’indiquer à quel étage se trouve un objet. Problème résolu ? Pas vraiment…
Comme l’ensemble des outils autour d’OSM fonctionne sur une logique 2D, leurs interfaces ne sont pas prévues pour gérer cette notion d’étage. Donc dès qu’un bâtiment est composé de plus d’un niveau, les données se superposent. On a donc un effet vrac du plus impressionnant.
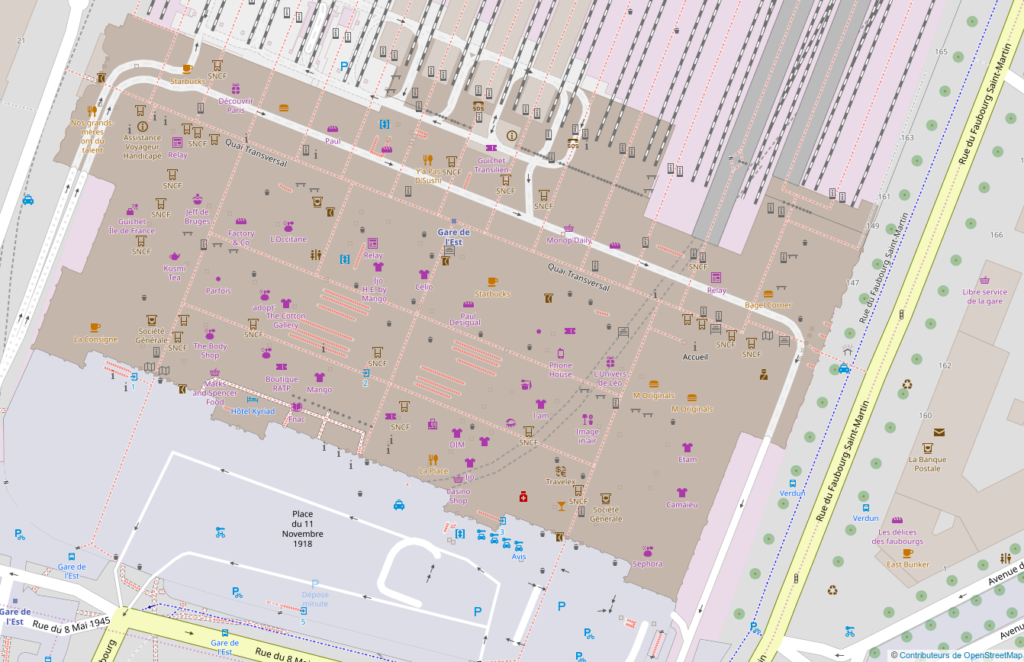
C’est d’autant plus frustrant que jusqu’à présent, l’ajout de données dans OpenStreetMap venait enrichir la carte et donc améliorer son rendu. Dans le cas de la cartographie d’intérieur, le rendu principal devient de moins en moins lisible au fur et à mesure que l’on détaille. Heureusement que des outils dédiés à la visualisation de ces données ont émergé au cours du temps (OpenLevelUp et OpenStationMap étant les deux seuls encore actifs).
C’était également le cas pour les éditeurs : tout se superposait sans possibilité de filtrer niveau par niveau. Sur ce point, la situation a récemment évolué :
- JOSM, l’éditeur historique et le plus complet, dispose désormais d’un sélecteur de niveaux
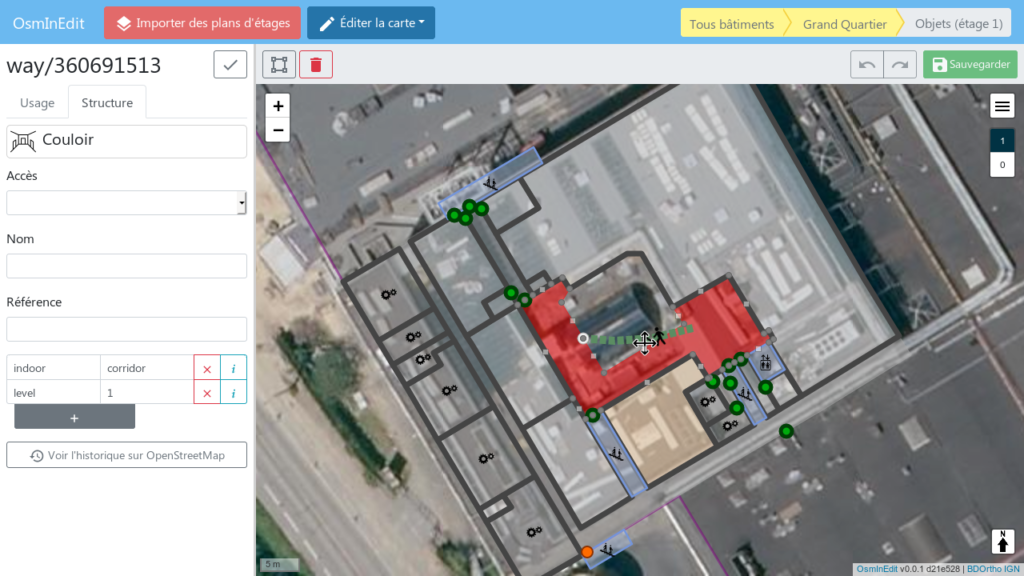
- OsmInEdit, un nouvel éditeur dédié à la cartographie d’intérieur, gère nativement le filtrage par niveau. Il propose de nombreux outils facilitant la contribution.
Ce manque d’outils et de visualisations a donc largement freiné la contribution sur la thématique.
À cause du cadre
Enfin, les derniers freins ne sont pas liés à OpenStreetMap, mais à la cartographie en intérieur de manière générale. Les systèmes de navigation type GPS ne sont pas disponibles dans l’enceinte des bâtiments (les signaux traversent mal les murs), ce qui rend complexe l’acquisition de données. On doit passer sur d’autres méthodes, à savoir :
- Si on a les moyens, du matériel professionnel d’acquisition (LIDAR)
- Sinon, papier + crayon + mètre (fastidieux) ou le décalquage depuis les plans d’évacuation ou d’architecte du bâtiment.

Sur OpenStreetMap, la grande majorité des contributions sont bénévoles, et donc se font avec relativement peu de moyens. La récolte de données complètement faite « à la main » avec notes et mesures est très fastidieuse, seuls les plus motivés s’y mettront. Par ailleurs, le contexte sécuritaire rend les relevés spontanés plus délicats, il vous faudra de bons arguments pour expliquer aux agents de sécurité pourquoi vous mesurez au centimètre près tout le bâtiment…
La contribution à partir de plans existants est largement plus accessible et plus rapide, mais pose la question des droits d’auteurs. Peut-on considérer un plan de bâtiment comme une création artistique qui tombe sous le joug du droit d’auteur ? Cette question n’a pas encore clairement été tranchée, et dépend des législations en vigueur dans chaque pays.
Ces contraintes pèsent donc fortement sur la simplicité de créer des données à l’intérieur des bâtiments.
Des solutions à envisager ?
Ces constats nous permettent de mettre en lumière les contraintes qui pèsent sur la cartographie d’intérieur dans OpenStreetMap. Maintenant, voyons comment on peut avancer concrètement pour lever ces freins.
Nettoyer les données

Première proposition, qui sera probablement la plus simple à mettre en oeuvre : finaliser la migration des données de l’ancien vers le nouveau schéma. Prenons le temps de convertir ces 260 bâtiments renseignés avec le schéma IndoorOSM vers le modèle Simple Indoor Tagging. On peut partir sur une transition douce, en dupliquant les attributs, ou une migration plus « directe » en remplaçant les attributs. On peut également envisager d’ajouter des règles de validations dans les outils (MapCSS pour JOSM et Osmose) pour que la migration soit distribuée entre plusieurs contributeurs. Une ébauche de règles pour JOSM a été créée, à compléter et surtout éditer les règles pré-existantes pour prendre en compte les évolutions.
Améliorer nos outils
Pour que la contribution sur la cartographie d’intérieur prenne de l’ampleur, il faut remettre en place le cercle vertueux de contribution d’OpenStreetMap : je vois la carte, j’ajoute des données visiblement manquantes, la carte s’améliore, je trouve de nouveaux manques, j’ajoute à nouveau… Cela passe donc par des outils de visualisation et d’édition efficaces.
Pour l’édition, je ne peux que vous encourager à tester OsmInEdit et à prendre part à son évolution : c’est un outil à la fois simple à utiliser et adapté au contexte de la cartographie d’intérieur. Avoir un sélecteur de niveau dans l’éditeur iD serait également un plus.
Pour la visualisation, de gros efforts sont encore possibles :
- Le rendu principal openstreetmap-carto devrait pouvoir afficher un rendu plus propre dans les lieux cartographiés en intérieur. Pour l’instant, les différentes demandes issues de la communauté n’ont pas trouvé d’écho.
- Les applications telles que Maps.me ou OsmAnd devraient pouvoir filtrer les données étages par étages dans les zones où les bâtiments décrits.
- Les rendus web dédiés comme OpenLevelUp doivent s’améliorer pour être plus rapides et ergonomiques, et possiblement utilisables sur mobile.
L’absence d’outils de visualisation efficace est bloquante dans la mise en place du cercle vertueux de contribution. La communauté et les équipes de développement doivent se mobiliser pour avancer sur le sujet.
Simplifier la collecte terrain
Dernier point : la facilitation de la collecte terrain. Nous avons vu que les relevés peuvent se montrer fastidieux si l’on ne se base pas sur le plan d’évacuation du bâtiment. Clarifier la loi pour déterminer si ces plans sont soumis au droit d’auteur permettra de lever le doute actuel. On peut imaginer un travail en collaboration avec les services des pompiers, qui disposent dans certains cas des plans des bâtiments dans leur zone d’intervention.
On peut également envisager une autre approche : que les opérateurs des lieux recevant du public se chargent de la contribution sur OpenStreetMap. Cela présente plusieurs avantages :
- Les opérateurs n’ont pas à diffuser leurs plans d’évacuation sous licence ouverte. La question de la propriété intellectuelle de ces plans ne se pose plus. De plus, l’opérateur garde la main sur les données diffusées (uniquement les espaces ouverts au public par exemple).
- Chaque opérateur est au fait des changements qui ont lieu dans son bâtiment. Il sera plus simple de réaliser les mises à jour rapidement et garantir un bon suivi des données dans OpenStreetMap.
- Il sera plus simple d’arriver rapidement à une couverture globale. Plutôt que la communauté de bénévoles se charge seule de l’ajout de ce type de données, chaque opérateur se charge de son établissement. De la même manière que le bénévole connaît bien sa rue, l’opérateur connaît bien son établissement et sera plus à même de le détailler rapidement.
Dans cette logique, la communauté et les professionnels autour d’OpenStreetMap doivent se mobiliser pour sensibiliser ces acteurs à cette thématique. Toutefois, les opérateurs de lieux recevant du public seront plus sensibles si la chaîne d’outils est complète et cohérente, sur la même logique que pour les contributeurs bénévoles.
En conclusion
Depuis les débuts de la cartographie d’intérieur sur OpenStreetMap en 2011, la communauté a largement progressé. Nous nous sommes dotés d’outils pour rendre possible l’ajout de ces données dans la base. Les premières initiatives à large échelle ont permis d’obtenir des retours concrets et pragmatiques sur la méthodologie. Il nous reste encore plusieurs étapes avant de devenir la base de référence en intérieur :
- Améliorer nos outils, à la fois pour les contributeurs et les réutilisateurs
- Lever les flous juridiques autour des plans d’évacuation des bâtiments
- Embarquer dans l’aventure les gestionnaires de lieux recevant du public

Mais ces défis ne doivent pas nous effrayer : en 15 ans, OSM a su s’imposer comme la base de données géographique de référence pour l’extérieur. Faisons la même chose pour l’intérieur des bâtiments 😉